



 Download(50MB)
Download(50MB) 1.1.4
1.1.4
 19.64MB
19.64MB
7.5
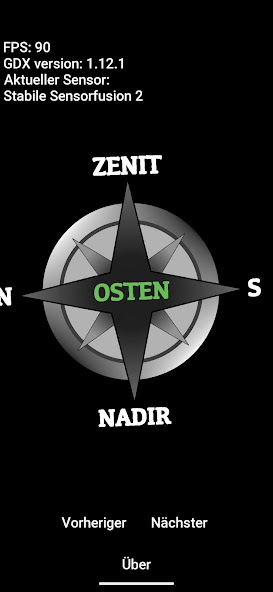
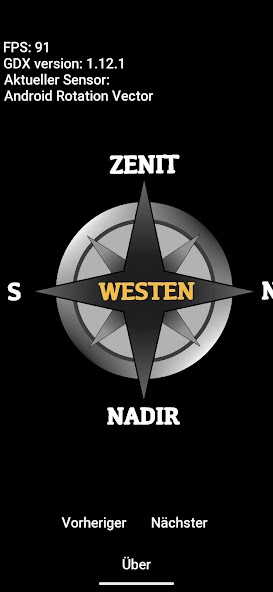
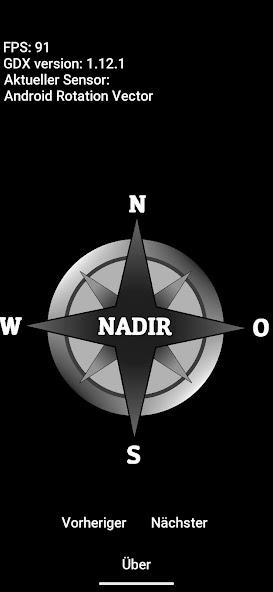
This application visualises the 3D orientation of the device as a 3D compass.
This application demonstrates the capabilities of various sensors and sensor-fusions. Data from the Gyroscope, Accelerometer and compass are combined in different ways and the result is shown as a 3D compass that can be rotated by rotating the device.
The major novelty in this application is the fusion of virtual sensors: "Improved Orientation Sensor 1" and "Improved Orientation Sensor 2" fuse the Android Rotation Vector with the virtual Gyroscope sensor to achieve a pose estimation with a previously unknown stability and precision.
Apart from these two sensors, the following sensors are available for comparison:
- Improved Orientation Sensor 1 (Sensor fusion of Android Rotation Vector and Calibrated Gyroscope - less stable but more accurate)
- Improved Orientation Sensor 2 (Sensor fusion of Android Rotation Vector and Calibrated Gyroscope - more stable but less accurate)
- Android Rotation Vector (Kalman filter fusion of Accelerometer + Gyroscope + Compass)
- Calibrated Gyroscope (Separate result of Kalman filter fusion of Accelerometer + Gyroscope + Compass)
- Gravity + Compass
- Accelerometer + Compass
- Deprecated Android Orientation Sensor (Complementary filter fusion of Accelerometer + Gyroscope + Compass)
The source code is publicly available and the link can be found in the About-section.
 Similarity
Similarity
May 15, 2026
May 15, 2026
May 15, 2026
May 15, 2026
May 14, 2026
May 14, 2026
May 14, 2026
May 14, 2026
May 14, 2026
May 14, 2026
May 14, 2026
May 14, 2026